Para nuestro proyecto final teníamos ganas de hacer algo por radio frecuencia y es ahí donde se nos ocurrió realizar un control remoto simple para poder manejar diferentes objetos, en este caso manejaremos la luz, la puerta de un garaje y un ventilador en sus 4 velocidades.
Para representar esto se utilizaron leds.
Codificador HT12-E
El HT12-E es un codificador al cual le ingresan 12 bits los cuales consta 8 de dirección, que deben ser iguales a la dirección que el receptor para asi poder comunicarse entre si, esto quiere decir que al tener 8 bits de direcciones, podemos tener hasta 256 transmisores diferentes sobre una misma frecuencia.
Los 4 bits restantes son de datos, es decir, lo que queremos transmitir que al tener 4 bits obviamente tenemos 16 combinaciones diferentes.
Ademas consta de un oscilador donde se le coloca una resistencia, en nuestro caso de 1MΩ para calibrar la velocidad de transmisión de datos.
Tambien consta de un TE (Transmission enable) el cual es activo por 0, por lo tanto nosotros lo pusimos directamente a masa para asi poder transmitir constantemente.
Este codicador acepta alimentación desde 2,4V – 12V pero nosotros lo alimentamos simplemente con 5V.
Por ultimo tenemos en el pin 17 la salida la cual es serial. A continuación unas imágenes con ejemplos:
Transmitiendo un 0:
Transmitiendo un 1:
Transmitiendo un 2:
Transmitiendo un 3:
Transmitiendo un 4:
Decodificador HT12-D
El HT12-D es un decodificador al cual le ingresan 12 bits los cuales consta 8 de dirección, que deben ser iguales a la dirección que el transmisor para asi poder comunicarse entre si, esto quiere decir que al tener 8 bits de direcciones.
Los 4 bits restantes son de datos, es decir, lo que queremos transmitir que al tener 4 bits obviamente tenemos 16 combinaciones diferentes.
Ademas consta de un oscilador donde se le coloca una resistencia, en nuestro caso de 47KΩ para calibrar la velocidad de recepción de datos.
Tambien consta de una salida VT (Valid transmission) el cual es activo por 1, por lo tanto nosotros lo dejamos al aire ya que no teníamos la necesidad de saber si estaba o no transmitiendo.
Este decodicador acepta alimentación desde 2,4V – 12V pero nosotros lo alimentamos simplemente con 5V.
Modulo transmisión
Usamos un modulo de transmisión por RF, el TWS-BS3 (433,92MHz), este modulo transmite a una frecuencia de 433,92 MHz con una modulación de tipo ASK, ¿Qué es una modulación de tipo ASK? Bueno básicamente una modulación de ASK (Amplitude-shift keying) es una modulación por desplazamiento de amplitud, es decir que los datos digitales se ven como variaciones de amplitud de la onda de portadora.
Tambien podemos pensarlo como un interruptor ON/OFF donde al tener presencia de la portadora tengo un 1 y en ausencia de la misma obtengo un 0.
Un ejemplo para entenderlo sería el código Morse.
Obteniendo información de diversos foros y páginas de internet conseguimos la información de que el transmisor debería transmitir a no más de 1200 baudios ya que al superar esta velocidad podría llegar a recibir “basura” del otro lado.
Este modulo puede ser alimentado de 3V – 12V pero nosotros lo alimentamos simplemente con 5V.
La antena leyendo por diferentes lugares supimos que debe ser de ¼ de onda, calculando la onda simplemente λ= velocidad de la luz / frecuencia
Modulo receptor
Usamos un modulo de transmisión por RF, el TWS-BS3 (433,92MHz), este modulo transmite a una frecuencia de 433,92 MHz con una modulación de tipo ASK y tiene una sensibilidad de -106dB y se alimenta únicamente con 5V.
La información de velocidad de transmisión y de la antena es igual que el modulo anterior.
PIC 16F84A
Usamos este microcontrolador ya que fue el mas utilizado durante el año en las practicas y lo conocía bien, sin contar que me alcanzaba justo las entradas y salidas.
Este micro no tiene micro interno por lo tanto le agregamos uno externo de 4Mhz entre los pines 15 y 16 con un cristal y 1 capacitor de 15pF de un pin del cristal a masa y lo mismo del otro pin del cristal.
Tiene un pin de MCLR (master clear) que seria básicamente un reset pero activo por 0, por lo tanto lo conecto a 5V.
Utilizo ambos puertos, el puerto A completo como entrada y el puerto B todo como salida salvo el pin 7 el cual también es utilizado como entrada.
Del puerto A desde RA0 a RA3 inclusive las entradas son los 4 datos enviados desde el decodificador y RA4 es un fin de carrera el cual representa el tope superior de la cortina.
Dentro del puerto B tenemos RB0 la salida de luz, RB1 cortina hacia arriba, RB2 cortina hacia abajo, RB6 primera velocidad de luz, RB5 segunda velocidad, RB4 tercera velocidad y RB3 cuarta velocidad. Por ultimo RB7 es utilizada como entrada que es un fin de carrera representando el tope inferior de la cortina.
El circuito de conexión de los los HT12 y los modulos de transmisión y recepción es igual que el de las hojas de datos tanto del modulo de transmisión o de recepción salvo por los pulsadores que los mando todos a 5V y las R de pull down de 10K a masa.
El circuito que vemos en la imagen anterior corresponde al circuito que vamos a estudiar, tanto su funcionamiento como sus componentes. Para ello lo primero que realizamos fue una lista con cada componente que íbamos a necesitar.
Una vez que vimos nuestras necesidades pasamos a averiguar que era cada componente, para que sirve y su funcionamiento. Para ello lo que necesitamos fueron los hojas de datos de todos los componentes a utilizar. Los componentes que buscamos fueron los que aparecen en la lista de materiales. (click para descargar las hojas de datos)
Una vez que teníamos las hojas de datos que requeríamos para poder comprender dicho circuito comenzamos a leerlas para saber con que componentes nos estábamos encontrando y tratar de entender su funcionamiento.
Circuito integrado 4002
Este circuito integrado es una compuerta NOR de cuatro entradas. Su ecuación lógica es:
Dicho en palabras seria la sumatoria de todos los estados lógicos de la entrada y una vez que tenemos el resultado lo negamos (es decir, si teníamos un "1" lógico pasa a ser un "0" lógico).
Para poder comprender lo que representa dicha ecuación es necesario saber álgebra de bool.
Configuración en circuito:
La primer compuerta tiene sus entradas conectadas a un resistor que va a VDD y su salida al pin 1 del 4510
La segunda compuerta esta conectada a las cuatro salidas del integrado 4510 y su salida conectada al transistor BC337 y a la pata de reset del flip flop.
Circuito integrado 4013
El circuito integrado 4013 es un dual flip flop, es decir consta de dos flip flop que se pueden usar por separado o unir los set y reset de cada uno y utilizar los dos juntos.
Como vemos en la imagen anterior vemos que el integrado es un doble flip flop "D" pero el mismo esta configurado como un flip flop "RS". El cual cuando se le da un pulso a la entrada de Set la salida Q se pondrá en "1" y la salida Q negada en "0". Pero cuando le coloquemos un "0" a la entrada de reset Q se pondrá en "0" y Q negada en "1". Para setearlo tenemos un pulsador a +V que al pulsarlo nos enviara un "1" lógico y este llegara a la pata de set del 4013 y como hemos dicho antes, cuando esto sucede la salida Q se ira a un "1" lógico.
Circuito integrado 4510
El 4510 es un contador BCD. Lo que hace es aumentar o disminuir su valor dependiendo de lo que poseamos a la entrada y los pulsos que le enviemos a la pata UP/DOWN. Además podemos configurar el número con el cual con el cual deseamos que empiece a contar. También posee un carry que es para ver cuando se esta produciendo un OverFlow. Para saber mas de su funcionamiento click aquí.
Configuración en circuito:
Vemos que tiene en pin "9" un reset, entonces le mandamos un "0" lógico para que el mismo no se resetee.
Además tenemos un pin de preseteo, lo cual hace que el integrado cargue todo el tiempo el valor que poseemos a la entrada cuando esta activo, como es activo por "1" lógico, entonces como queremos que este desactivado para que pueda contar le mandamos un "0" lógico a través de una compuerta NOR.
También tenemos el pin "10" que es el UP/DOWN que lo que produce es aumentar o disminuir el valor que esta contando dependiendo de que tipo de tensión poseemos cuando lee la pata con el pulso que nos llega del clock. Si es positiva dicha tensión aumentara el valor, si el valor es nulo lo que hará sera disminuir el valor. En este caso le estamos enviando un "0" lógico para que el número disminuya.
Luego tenemos el Carry In en pata "5", a esta pata le enviamos un "0" lógico para activarlo, así cuando llegue a el máximo valor de preselección deje de contar, en este caso 0. Pero este valor se lo enviamos desde el flip flop, que es el integrado 4013. A este integrado que es un flip flop "D" lo configuramos con un flip flop "RS" para que cuando le mandamos un pulso a set se setee y luego cuando el contador llegue a 0 saldrá de cada salida un "0" lógico (por las salidas Q1, Q2, Q3 y Q4).
Esas cuatro salidas nombradas anteriormente son enviadas a cuatro entradas del 4002, pero la segunda compuerta y como es una cuando todas sus entradas se encuentren en "0" lógico nos dará un "1" lógico a la salida. Este uno entra por pata "4" del 4013 y resetea dicho integrado produciendo que la salida Q negada (pata 2) se ponga en "1" y a pata "5" del 4510 le llegue dicho uno "1". La pata "7" que es el CarryOut no la conectamos. Y por último las cuatro salidas del 4510 las mandamos a las cuatro entradas del 4511 ("A1" a "A", "A2" a "B", "A3" a "C" y "A4" a "D").
Circuito integrado 4511
Este integrado es un conversor de BCD a 7-segmentos. Lo que hace es recibir un dato codificado en BCD y lo transforma a 7-segmentos para poder mostrar su valor a través de un display de 7-segmentos.
Configuración en circuito:
Comenzamos viendo sus patas y ver como hay que configurarlo para su correcto funcionamiento.
El lamp test, blanking input y el latch enable or Strobe son para probar el display, entonces lo desactivaremos, para ellos lo que haremos sera conectar el lamp test y blanking input a +V y el LE/STBE a masa.
Como antes mencionamos las salidas del 4510 van a la entrada del 4511.
Todas las salidas van a un resistor de 330 Ω y luego van al display.
Para finalizar de las entradas del 4511 sacamos una NOR de 4 entradas y la mandamos a la pata de reset del 4013. Y además de la salida del 4013 sacamos un resistor de 10 KΩ a un transistor BC 337 y le colgamos un buzzer por colector y lo mandamos a masa.
Funcionamiento del circuito:
Cuando activamos las alimentaciones veremos que el display aparecerá encendido en el número nueve. Esto se debe a que este diseño empieza a contar desde dicho numero, por lo tanto en el seteo del integrado 4510, es decir, los pines A,1 A2, A3 y A4 se le configura la codificación necesaria para poder representar el número deseado. Entonces mientras el circuito se encuentre activo, osea con sus alimentaciones conectadas, veremos en el display el número nueve hasta su activación a través del pulsador.
Cuando activamos el circuito mediante el pulsador lo que sucede es que el flip flop por su configuración se setea y cambia la salida de Q negada a "0" lógico. Este "0" lógico llega al pin 5 del 4510 (este pin es el encargado de hacer que el integrado cuente o deje de hacerlo).
Cuando el pin 5 recibe el "0" lógico lo que ocurre es que el contador empieza a contar. Esto se debe a que cuando en la entrada de CI tenemos un 1 lógico el integrado no cuenta, ya que su entrada es activa por 0.
Ahora con la habilitación CI del integrado 4510 activada va a comenzar el funcionamiento del mismo, es decir, comienza a contar en forma descendente.
Luego lo que ocurrirá es que el contador empieza a variar sus salidas para mostrar la codificación del número que esta contando, en nuestro caso nos mostrara el "8,7,6.....0" (todos estos números están codificados en BCD natural).
Luego esas codificaciones son enviada de las salidas del 4510 a las entradas del 4511.
Al llegarle el código el 4511 lo que hace es transformar el número que posee en su entrada y transformarlo a 7-segmentos, para que luego el display se prenda de manera que podamos ver el número que necesitamos.
Ahora las salidas del 4511 son enviadas a un resistor y al display de 7-segmentos. Los resistores son para limitar la corriente y así no quemar el display y además poder controlar la luminosidad del display.
Mientras los números van descendiendo los datos van yendo del 4510 hacia el 4511 y del 4511 a el display, por lo tanto mientras va variando podemos observar el número que esta contando.
Una vez que el circuito finaliza su conteo lo que sucede es que el número "0" se ve en el display.
Como la cuenta finalizo y tenemos el número 0, lo que ocurre es que la configuración en BCD del número "0" nos va a generar un "1" lógico en salida del integrado 4002B (en la segunda compuerta utilizada, por eso el "B" al final del nombre del integrado). El 4002B esta conectado sus cuatro pines de entrada a las salidas Q1, Q2,Q3 y Q4. Y la salida del 4002B va al transistor BC337 y a la pata de reset el flip flop.
El "1"lógico generado por la compuerta nos va a producir dos cosas. Primero nos va a saturar el transistor BC337 produciendo la activación del buzzer. Y segundo nos va a resetear el flip flop ya que nos va a llegar un "1" lógico a la pata de reset produciendo que la salida Q negada pase a "1". Cuando esto ocurra al pin 5 del 4510 nos llegara un "1" y deshabilitara dicha pata produciendo que el integrado se ponga en un estado que no cuenta y deja el número por el cual iba contando
Cuando el buzzer es activado empieza a sonar hasta que apaguemos las alimentaciones del circuito.
Para reiniciar el circuito hay que desconectar la alimentación y volver a encenderla así todos los valores vuelven a su configuración inicial.
En esta nueva actividad lo que haremos sera aprender aun mas sobre los amplificadores operacionales, pero no seguiremos viendo solo la teoría, lo que vamos a hacer es ver su funcionamiento practico.
En este trabajo práctico utilizaremos el amplificador operacional LM 741, a continuación indicaremos su pinout.
En la primera experiencia armamos el circuito denominado como Amplificador Inversor. Pero sumandole a la entrada un divisor resistivo con un preset.
Donde la formula de Vout es: Vo = -Vi * (R2 / R1)
Al medir el divisor resistivo con el preset todo hacia la izquierda nos dio exactamente 1.14V, en el centro nos dio aproximadamente 0V y todo hacia la derecha nos dio -1.21V.
Vs [V]
Vo[V]
0,96
-8,95
0,95
-8,95
0,79
-8,93
0,52
-8,02
0,18
-2,73
0
0
-0,02
3,2
-0,41
6,38
-0,52
8,14
-0,85
9,58
-1,02
9,58
El circuito por lo visto en el gráfico no se comporta linealmente y demuestra que se lo llama inversor debido a que al ingresarle una tensión positiva a la salida obtengo tensión negativa y viceversa.
Luego pasamos a medir en modo X - Y donde muestra un gráfico siendo Y la Vs y siendo X la Vo. Teniendo en la entrada una señal triangular de 2Vpp con una frecuencia de 1KHz.
Por la formula de ganancia vista anteriormente sabemos que la ganancia es de 15 veces, que sería 23.52dB y al variar la tensión de entrada siempre y cuando no se sobrepase el 75% de los valores máximos admisibles, en la ganancia no se va a producir ninguna variación.
Si cambiamos la R2 que es la Resistencia de realimentación a 220K la ganancia aumentara, en cambio si disminuyo la R1 la ganancia disminuira.
Si quitamos la RL o Resistencia de carga no varía la ganancia ya que como se ve en la formula no depende de ella.
Si al pin 4 donde esta conectada la carga negativa lo mandamos a GND la tensión queda fija en 9.12V salvo cuando se llega a los extremos del preset donde cae abruptamente.
Ahora, si desconectamos el puente J1 que seria la alimentación de continua y en vez de ello le inyectamos una señal senoidal menor a 400mVpp con una frecuencia de 1KHz nos da la siguiente tensión de salida.
Si aumentara demasiado la tensión de entrada el circuito llega a un momento donde ya no puede dar mas tensión y es donde empieza a recortar la señal así dando la máxima tensión como muestra la siguiente imagen.
Al aumentar la ganancia a 1MHz, la ganancia empieza a dejar de responder al cociente entre R2 y R1, a diferencia de si utilizara un TL082 no ocurriría, en el caso del 741 lo que sucede es que a partir de esa frecuencia empieza a atenuar la señal y en el TL082 no sucede ya que la frecuencia máxima hasta donde sigue manteniendo la relación es al rededor de los 5MHz.
En la segunda actividad armamos un Amplificador No Inversor donde el circuito es el siguiente.
Donde la formula de Vout es la siguiente: Vo = Vi * (1 + (R2 / R1))
Ahora vamos a ir mostrando diferentes mediciones que fuimos haciendo al ir aumentando la tension de entrada de la señal la cual era de 1KHz hasta que llegue a recortar.
En el caso de que hagamos un cortocircuito en la resistencia de realimentación y se convierta en un buffer la ganancia pasa a ser 1, Este circuito se lo utiliza normalmente para separar etapas y por eso mismo también es conocido como "separador" y se lo utiliza para adaptar impedancias, es decir eliminar los efectos de cargas importantes.
Para Calcular la Ri del operacional, lo que se puede hacer es conectar una fuente de continua a una resistencia cuyo valor conocemos, esa resistencia a la pata positiva del operacional y a la pata inversora conectarla a masa, todo esto sin alimentacion. Medimos la tension entre la fuente y masa, luego medimos la tension en la resistencia, con la tension calculamos la corriente y luego lo unico que hay que hacer es la tension total menos la tension en la resistencia sobre la corriente y asi obtenemos la Ri del operacional
En esta actividad lo que haremos sera conocer tanto el mecanismo interno del 555 como su funcionamiento para poder efectuar las distintas configuraciones que nos puede proporcionar este integrado.
Acá tenemos Hoja de datos del LM555 el cual nos va a proporcionar información sobre dicho integrado. En la misma podremos ver las configuraciones que nos ofrece el integrado y cuales son las especificaciones que debemos seguir para un correcto funcionamiento del mismo.Dentro de la hoja de datos también encontraremos el PINOUT del integrado y la configuración interna.
Función de cada PIN
GND (normalmente la 1): es el polo negativo de la alimentación, generalmente tierra.
Disparo (normalmente la 2): Es en esta patilla, donde se establece el inicio del tiempo de retardo, si el 555 es configurado como monostable. Este proceso de disparo ocurre cuando este pin va por debajo del nivel de 1/3 del voltaje de alimentación. Este pulso debe ser de corta duración, pues si se mantiene bajo por mucho tiempo la salida se quedará en alto hasta que la entrada de disparo pase a alto otra vez.
Salida (normalmente la 3): Aquí veremos el resultado de la operación deltemporizador, ya sea que esté conectado como monostable, astable u otro. Cuando la salida es alta, el voltaje será el voltaje de alimentación (Vcc) menos 1.7 Voltios. Esta salida se puede obligar a estar en casi 0 voltios con la ayuda de la patilla de reset (normalmente la 4).
Reset (normalmente la 4): Si se pone a un nivel por debajo de 0.7 Voltios, pone la patilla de salida a nivel bajo. Si por algún motivo esta patilla no se utiliza hay que conectarla a Vcc para evitar que el 555 se "resetee".
Control de voltaje (normalmente la 5): Cuando el temporizadorse utiliza en el modo de controlador de voltaje, el voltaje en esta patilla puede variar casi desde Vcc (en la práctica como Vcc -1 voltio) hasta casi 0 V (aprox. 2 Voltios). Así es posible modificar los tiempos en que la salida está en alto o en bajo independiente del diseño (establecido por las resistencias y condensadores conectados externamente al 555). El voltaje aplicado a la patilla de control de voltaje puede variar entre un 45 y un 90 % de Vcc en la configuración monostable. Cuando se utiliza la configuración astable, el voltaje puede variar desde 1.7 voltios hasta Vcc. Modificando el voltaje en esta patilla en la configuración astable causará la frecuencia original del astable sea modulada en frecuencia (FM). Si esta patilla no se utiliza, se recomienda ponerle un condensador de 0.01μF para evitar las interferencias.
Umbral (normalmente la 6): Es una entrada a un comparador interno que tiene el 555 y se utiliza para poner la salida a nivel bajo.
Descarga (normalmente la 7): Utilizado para descargar con efectividad el condensador externo utilizado por el temporizador para su funcionamiento.
V+ (normalmente la 8): También llamado Vcc, alimentación, es el pin donde se conecta el voltaje de alimentación que va de 4.5 voltios hasta 18 voltios (máximo). Hay versiones militares de este integrado que llegan hasta 18 Voltios.
Este integrado puede utilizarse entre otras cosas para el diseño de:
Circuitos monoestables
Osciladores astables
Generador de rampas de tensión
Detector de desaparición de impulsos
Circuitos moduladores de impulsos
Temporizadores secuenciales
Osciladores controlados en tensión
Sus características más destacadas son:
Trabaja con tiempos desde microsegundos a horas
Puede funcionar en modo astable o monoestable
Ciclo de trabajo ajustable
Corrientes de salida de +-200mA
Compatible con TTL con Vcc=5V
Muy estable con la temperatura 0.005% por ºC
Tensión de alimentación entre 4.5 y 18V
Configuraciones:
Astable
Monoestable
Acá les dejo un vídeo donde muestra el funcionamiento del LM555 y alguna de sus aplicaciones:
Acá dejo otro video de como utilizar el proteus para la actividad que vamos a realizar:
Aspectos básicos del Proteus
Proteus es un programa para simular circuitos electrónicos complejos integrando inclusive desarrollos realizados con microcontroladores de varios tipos, en una herramienta de alto desempeño con unas capacidades graficas impresionantes. Presenta una filosofía de trabajo semejante al SPICE, arrastrando componentes de una barra e incrustandolos en la aplicación, como no es el objetivo de esta ayuda, dar un curso de Proteus si resaltaremos los aspectos relacionados a la configuración del proteus para que pueda simular diseños realizados para microcontroladores PIC usando las herramientas del curso de procesadores. Una caracteristica por el cual el programa Proteus se destaca de los otros simuladores es que se puede simular el microcontrolador conectado al circuito habiendole precargado el programa es decir, te simula el programa y que hace en el programa.
Esta información fue tomada de http://www.frino.com.ar/proteus.htm Además de dicha pagina podemos ver como configurar el programa.
Acá comienza la actividad con el astable:
Primero realizamos el circuito en proteus como el que vemos en la imagen anterior. Luego lo que hicimos fue verificar que el circuito funcionara correctamente con el osciloscopio, entonces lo que hicimos fue simularlo y ver la salida del 555 y como se carga y descarga el capacitor C1
La linea en Amarillo es la salida del 555 (pata 3) y la linea en celeste es la capacitor "C1"
La frecuencia de oscilación 992 Hz
El periodo dura 1 ms
La tensión en la salida es de 5v cuando esta en estado alto y 0v cuando se encuentra en estado bajo
El ciclo de trabajo es de D% = ( T1 / T ) * 100%
Donde D es Duty, T1 es el tiempo en que la salida se encuentra activa y T es el periodo, entonces hallamos el valor del ciclo de trabajo expresado en porcentaje:
R1 = 68K R2 = 39K C1 = C2 = 10nF V+ = 5v
T1 = Ln (2) * C1 * ( R1 + R2 )
T1 = 0,7416
T2 = Ln (2) * C1 * R2
T2 = 0,2703
T = T1 + T2
T = 1 ms
D% = ( T1 / T ) * 100% = 73,28%
Entonces el ciclo de trabajo es del 73,28% por ende, de todo el periodo el 73,23% estará en estado alto mientras que el 26,62% restante estará en estado bajo. Esto se puede observar en el gráfico mostrado arriba.
La tensión con la cual se va a cargar y descargar el capacitor sera de 0 a 2/3 de Vcc y una vez cargado se ira a descarga hasta llegar a 0v.
2/3 de Vcc = 2,686v
Si desconectaras el pin de reset de V+ y lo conectaramos a GND lo que va a producir es que la salida se vaya a 0 y deje de funcionar hasta que lo vuelvas a conectar la pata a V+
Para poder armar un 555 de 40KHz lo que tenemos que hacer es guiarnos por la hoja de datos para ver que capacitores y resistores nos conviene utilizar. Nos fijamos y utilizamos estos componentes:
Supongo capacitor por la curva del 555 para aproximar el valor de resistor.
C1 = 10nF
Pero para llegar a dichos valores tuvimos que realizar ciertos cálculos como los que vemos a continuación:
Periodo = 1 / Frecuencia
T = 25 us
El duty lo elegimos nosotros, elegimos este particularmente debido a que los valores de resistencia nos van a dar iguales como a continuación lo demostraremos. D% = 66 %
66% = T1 / T
T1 = 66% * T
T1 = 0,0165ms
T1 = Ln (2) * C1 * ( R1 + R2 )
T2 = Ln (2) * C1 * R2
0,0165 ms = Ln (2) * C * ( R1 + R2 )
0,0085 ms = Ln (2) * C *R2
R2 = 0,0085 ms / ( Ln (2) * C)
R2 = 1k2
0,0165ms = Ln (2) * C * ( R1 + R2 )
R1 = [0,0165 / (Ln (2) * C)] - R2
R1 = 1K2
Cuando ya teníamos todo calculado procedimos al armado del circuito para verificar el correcto funcionamiento del mismo.
Para poder armar el circuito lo que hicimos fue conseguir los materiales que habíamos calculado anteriormente, tener un protoboard y cables de par telefónico para poder conectar los distintos pines y alimentaciones del circuito.
Pasos a seguir para la realización del 555 en configuración astable:
Lo primero que debemos hacer es colocar el integrado en el protoboard y empezar a ver el circuito que diseñamos previamente para así poder empezar con el armado.
Luego empezamos a conectar las alimentaciones, es decir conectamos a la pata "8" Vcc (+5v) y a la pata "1" GND (0v)
Por especificaciones tecnicas en la pata 5 colocaremos un capacitor de 10pF
Colocaremos Vcc a pata "4" para que este funcionando y no se nos resetee el integrado y pueda funcionar correctamente
Paso siguiente colocaremos la resitencia denominada "R1" entre Vcc y la pata "7"
Luego desde la pata "7" colocaremos una segunda resistencia denominada "R2" a la pata "6" la cual va a estar puenteada con la pata "2"
De la pata "2" sacaremos un capacitor llamado "C1" y lo conectamos a GND
Y en la pata "3" es donde mediremos la señal de salida la cual veremos a continuación
Y nuestro ultimo paso sera revisar el circuito para que ver que no hayamos cometido ninguna falla en el conexionado y que funcione correctamente.
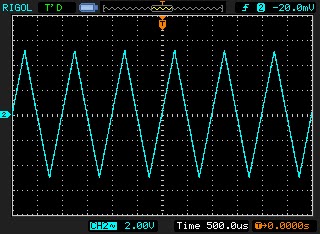
En esta imagen observamos la salida que obtuvimos al medir con el osciloscopio el circuito diseñado
(medido en pata "3")
En la imagen lo que podemos observar es el ciclo de trabajo de 555 con la configuración en modo astable. Podemos ver que la salida esta mas tiempo en estado alto que estado bajo, por lo tanto el ciclo de trabajo es mayor al 50% y como hemos calculado deberia de ser del 66% pero no lo es, a continuación veremos un cuadro comparativo que nos compara los valores teóricos con los prácticos y ahi veremos la diferencias que encontramos
Como se ve en el cuadro anterior los valores teóricos difieren a los prácticos y por eso es que cuando vemos lo obtenido en el circuito que hemos armado no obtenemos los mismo valores que habiamos calculado previamente porque no estamos partiendo con los mismo valores debido a las imperfecciones que tienen los componentes a la hora de su fabricacion, ya que no se pueden hacer todos los componentes iguales. Estas imperfecciones hacen que nuestro resultado varie en algunos aspectos, como por ejemplo: como los valores de los resistores y del capacitor no son los que habiamos calculado esto nos modificara los tiempos de estado alto y bajo del 555 ya que dependen directamente de la resistencia y del capacitor. Si nosotros aumentamos la resistencia el tiempo sera mayor, al igual que si en vez de la resistencia aumentaramos el capacitor o subiéramos ambos valores, tanto de resistencia como del capacitor. También vemos que la tensión maxima no es la misma ya que se pierde algo de tensión en la fuente que tal vez nos entrega un poco menos de la requerida. Debido a todo es que nuestro resultado no sera identico al cualcuado por nosotros idealmente.
Luego de haber echo todos estos calculos lo que hicimos fue diseñarlo en plaqueta y lo primero que hicimos fue armar el esquemático y nos quedo asi
Este fue nuestro esquemático, un 555 en configuración hastable que consta de 2 resistores, 2 capacitores y 1 LM 555. Esta conectado como mensionamos anteriormente. Una vez que teniamos estos diseñado pasamos a la parte del diseño de la plaqueta, pero primero tuvimos que poner las reglas para poder diseñar correctamente y con las normas que requerimos para que su funcionamiento sea el correcto.
La perimer regla que pusismo fue cambiar la distancia entre pistas y en polygon plane. Para ello vamos a Desing, luego a rules y nos aparecera una nueva ventana como la siguiente
Y aca lo que haremos sera modificar las medidas, ponerle 10 mil a la separación entre pistas y 40 mil a la separación en polygon plane, pero para el polygon lo que deberemos hacer sera cambiar las opciones a como lo vemos en la siguiente imagen
Y ahi ya tenemos estas reglas puestas y proseguimos al siguiente paso
Ahora lo que haremos sera cambiar el ancho de las pistas, para ellos vamos a Width Constraint
Una vez que estamos aquí lo que haremos sera hacer doble click en la capa y modificarlo y ponerlo como vemos a continuación
Una vez que le dimos a todos los tamaños 20 mil ya terminamos con este paso y podemos continuar al siguiente
Ahora vamos a proseguir con seleccionar las lineas de ruteo, para ellos vamos a ir a Routing Layers
Luego tenemos que hacer doble click en la opción que nos da y poner en TopLayer "Not used" y en BottomLayer "Any" y termianmos con este paso y vamos al ultimo paso para poder finalizar de determinar las reglas a utilizar
Por ultimo vamos a la pestaña que dice manufacturing
Ahora lo que tenemos que hacer es entrar a la opción que nos da y modificar el tipo de conexionado a directo como se ve en la siguiente imágen
Una vez terminado de hacer esto ya estamos listo para empezar nuestro ruteado.
Luego lo que hicimos fue rutear nuestra plaqueta y asi es como nos quedo
Ahora comenzamos a trabajar con el 555 en su configuración de monoestable.
Lo primero que hicimos fue simular en el proteus el 555 en su configuración monoestable en el proteus y ver que era lo que sucedía.
En la imagen que acabamos de ver podemos observar la salida del 555 en su configuración monoestable (color amarillo) y la carga del capacitor (color celeste). En el gráfico lo que podemos ver es que desde que se da el pulso de inicio el LM 555 comienza a funcionar lo que hace es pasar de estado bajo a un estado alto durante el tiempo establecido por la siguiente ecuación:
T = Ln (3) * C * R
Esta ecuación es la que nos va a dar el tiempo de trabajo del integrado y el valor de este tiempo estará determinado por el valor de resistencia y capacitor.
Una vez que supimos la ecuación lo que hicimos fue plantearnos hacer el circuito nosotros para poder verlo diseñado por nosotros mismo y comprobar que pasaba en la practica, ya que la teoría no es igual a la practica. Entonces con el desafió planteado por el profesor y nuestra curiosidad lo que proseguimos a hacer es armar el circuito para ello primero calculamos el tiempo de trabajo. Para ello utilizamos al formula que previamente hemos mostrado y la aplicamos para ver los valores de los componentes requeridos. Lo s pasos fueron los siguientes:
Primero planteamos la ecuación con el tiempo que requeríamos
50 mseg = Ln (3) * C * R
Luego supusimos un valor de capacitor por hoja de datos para poder estimar el valor de resistencia, el valor seleccionado fue 10 uF, elegimos suponer el valor de capacitor y no el de la resistencia porque hay mas valores de resistencia que de capacitores
50 mseg = 1,1 * 10 uF * R
Los siguiente fue despejar el valor de R
R = 50 mseg / ( 10 uF * 1,1 )
Hallamos el valor de R
R = 4,55 K
Una vez que tenemos el valor de la resistencia la normalizamos
R = 4,7K
Ahora procedemos a re calcular el tiempo de trabajo
T = Ln (3) * C * R
T = 1,1 * 10uF * 4,7 K
Hallamos el nuevo tiempo de trabajo con la resistencia normalizada
T = 51,634 mseg
Una vez que poseíamos todos los valores necesarios para poder emplear nuestro circuito comenzamos con el armado, pero previamente conseguimos todos los componentes necesarios para poder armarlo y medirlo.
Los materiales utilizados fueron los siguientes:
Resistencia de 4,7 K
Resistencia de 10 K
Capacitor de 10 uF
Capacitor de 10 pF
Pulsador
LM 555
Protoboard
Cables de par telefónico
Cable para conectar al osciloscopio
Cable para conectar a la fuente
Una fuente que nos provea de +5v
Una vez que teníamos todos los componentes que necesitábamos pasamos a armar el circuito siguiendo los pasos que a continuación voy a describir:
Primero colocaremos el 555 en el protoboard
Luego empezamos por conectar la alimentación, es decir, conectamos a la pata "8" +5v y a la pata "1" le conectaremos GND
Ahora conectamos +5v a pata "4" para que el 555 no se resetee y funcione correctamente mientras lo necesitemos
Después seguiremos por conectar una especificación técnica que veremos por hoja de datos que nos indica que debemos colocar un capacitor de 10 pF a la pata "5" del 555
Luego conectamos la resistencia calculada entre +5v y la pata "7"
Próximo paso puenteamos la pata "6" con la pata "7"
Paso siguiente de pata "6" sacamos un capacitor (el que habíamos supuesto) y lo mandamos a GND
Ahora lo que haremos sera colocar una resistencia de pull-up, para ellos la pondremos entre +5v y pata 2
Lo que tenemos que hacer ahora es conectar el pulsador entre la pata "2" y GND
La pata "3" quedara sin conexión hasta que la tengamos que usar para medir la salida, en ese momento lo que haremos sera sacar un cable de la pata "3" y conectarlo a la punta del osciloscopio
Y el ultimo paso sera revisar el circuito para comprobar que no haya ninguna equivocación y que el circuito funcione correctamente.
Y lo que resta sera probar el correcto funcionamiento del circuito.
Lo que hicimos luego de lo siguiente fue probar el circuito y ver que nos diera como habíamos visto cuando simulamos el circuito y esto fue lo que obtuvimos a la salida
La salida nos dio como lo habíamos previsto, salvando por los valores obtenidos que era lo mas seguro debido a las imperfecciones que poseen los materiales. Las diferencias que encontramos se pueden observar en el cuadro que veremos a continuación
En el cuadro que hemos visto se pueden notar las diferencias entre la teoría y la practica, estas diferencias son las que hacen que nuestros cálculos no sean iguales a los resultados prácticos.
Luego de todo lo visto nos apareció una curiosidad que pasaba si manteníamos apretado el pulsador más tiempo que el que habíamos calculado. Entonces probamos a ver que era lo que sucedía y lo que paso fue que la salida se mantuvo en estado alto hasta que soltamos el pulsador y se cumpliera el tiempo que habíamos seleccionado.
Para finalizar lo que hicimos fue diseñarlo en plaqueta y así nos quedo el esquemático y el PCB (para la realización de esta plaqueta seguimos los mismo pasos que para la realización de la plaqueta astable):
Esquemático
Plaqueta
Observaciones y datos adicionales:
El 555 es un integrado que pude cumplir varias funciones, ya que se lo pude utilizar para varias aplicaciones dependiendo de su configuración
Este integrado en configuración astable nos proporciona un ciclo de trabajo el cual posee dos estados, uno alto y otro bajo. En el estado alto nos proveerá de la tensión igual o muy próxima a la de alimentación y en el estado bajo nos dará una tensión igual a 0v.
El 555 en su configuración monoestable nos proporcionara un solo momento de trabajo el cual sera cuando nosotros le demos el inicio a través del pulsador, una vez que se le da el comienzo al circuito este empieza a trabajar durante un tiempo que previamente hemos seleccionado adecuadamente para el trabajo que vayamos a efectuar. Entonces la salida permanecerá en un estado alto hasta que el tiempo que habíamos calculado haya finalizado y automáticamente la salida pasara a 0v.
Cuando el 555 se encuentra en configuración monoestable si mantemos el pulsador la salida se encontrara en estado alto hasta que soltemos el pulsador y luego de soltarlo esperara a cumplir el tiempo indicado y se apagara.
Una curiosidad fue que los 555 en sus dos configuraciones se pueden conectar entre si y producir una nueva salida dependiente de el integrado anterior. Para poder hacer esto lo que se debe hacer es conectar la salida del 555 a la pata de reset del segundo 555 y lo que hará sera que mientras la salida del primer 555 este activo el segundo permanecerá activo y cuando la salida del primer integrado pase a el estado bajo el segundo integrado se reseteara y pasara su salida a 0. A esto se lo llama un tren de pulso. Además se podría conectar un tercer 555 a la salida del segundo 555 y que cuando el segundo 555 este en estado alto lo que pasara sera que en vez de tener la salida de este integrado, tendremos la activación del tercer 555 y veremos la salida del tercer 555. Produciendo así el tren de pulsos.
Ademas hemos visto que la teoría no es igual a la practica por la imperfecciones de los materiales utilizados, por lo tanto debemos prevenir dicho errores para no tener problemas a la hora de usar un circuito, para algo especifico y que los valores que creíamos tener sean los mismos y no otros ya que esto nos podría traer problemas luego.


















































{kind=link}